
Digital solar sensitivity
2025年8月29日
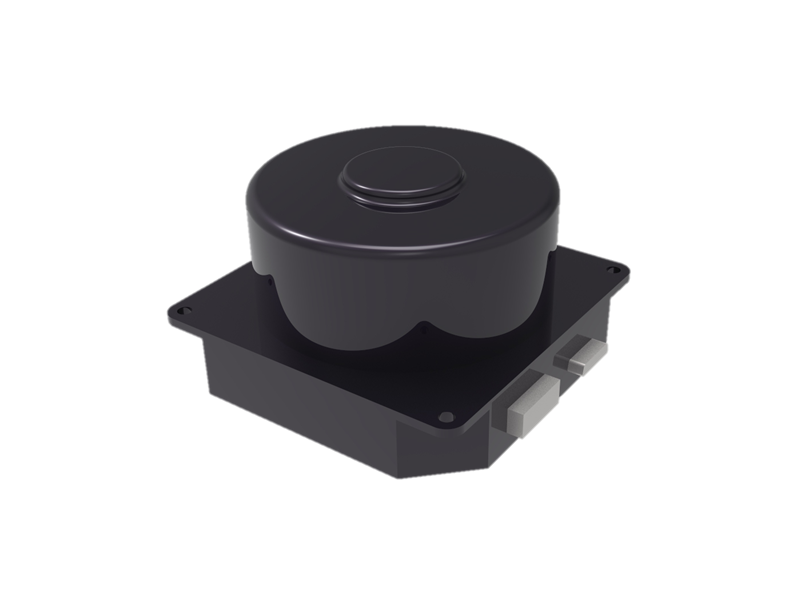
Magnetic torque
2025年8月29日The product adopts an integrated design of flywheel body and control circuit, which is small in size and light in weight. It supports speed control mode and torque control mode. It has the characteristics of high speed control accuracy, low steady-state power consumption, and high reliability. It has been applied to a number of satellites in orbit.
| Product code | CG-DJ-FW-3mN·m | CG-DJ-FW-1.4mN·m | CG-DJ-FW-15mN·m | CG-DJ-FW-150mN·m |
| Envelope size | 139mm×100 mm×73.5 mm | Single wheels: ≤71 mm × 71 mm × 40 mm Control board: ≤94 mm × 94 mm × 15 mm | 113 mm×152 mm×74 mm | Φ252 mm×125 mm |
| Weight | 0.83kg | Single wheel: ≤160g Control board: ≤110g | ≤1.29kg | 9±0.3kg |
| Power consumption (three flywheels) | Steady-state ≤ 1.8W (@2000rpm) peak ≤7W (@5000rpm/3mNm) | Standby power consumption: ≤1.2W Steady-state power consumption: ≤3.5W (@3000rpm) Peak power consumption: ≤13.2W | Standby power consumption: ≤1.8W; steady-state power consumption: ≤4.1W (@3000rpm); Peak power consumption: ≤23W. | ≤5W(@1000rpm)≤75W |
| Operating voltage | 12±1V | 9V-12.5V | 12V±1.2V | 30V±3V |
| Communication interface | RS422 | CAN | RS422 | RS422 |
| Angular momentum | ≥0.1Nms(@±6000rpm) | ≥ 50mNms(@9000rpm) | ≥ 0.5Nms(@6000rpm) | 15Nms(@3100rpm) |
| Output torque | ≥3mNm(0~±6000rpm) | ≥1.4mNm(0~±6000rpm) | ≥15mNm(0~±5000rpm) | 0.15Nm |
| Working mode | Standby mode, speed mode | Standby mode, speed mode | Speed mode, current mode, standby mode | Standby mode, current mode, and speed mode |
| Precision | ≤±1rpm | ≤±1rpm | ≤±0.2 rpm (500 rpm or more) ≤± 1 rpm (500 rpm ~ 100 rpm) ≤± 5 rpm (100 rpm or less) | \ |
| Delivery cycle | 3 months | 3 months | 3 months | 3 months |

{kind=link}